
NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割
Open3D 是一个开源库,提供了一组 3D 数据处理工具和算法。 它是用 C++ 编写的,并具有 Python 绑定,使其可供广泛的用户使用。
Open3D 被设计为易于使用,可用于各种 3D 数据处理任务,例如点云和网格处理、3D 重建和可视化。 它还提供高级功能,例如注册和基于深度学习的语义分割。
Open3D 在研究社区中广泛使用,是实现 3D 算法和应用程序的流行选择。本文将介绍如何使用Open3D渲染3D点云。
首先导入Open3D库:
import open3d as o3d
import numpy as np
import plotly.graph_objects as go然后读取3D点云数据:
print("Load a ply point cloud, print it, and render it")
ply_point_cloud = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
points = np.asarray(pcd.points)
print(pcd)
print(np.asarray(pcd.points))
处理点云的颜色和法线:
colors = None
if pcd.has_colors():
colors = np.asarray(pcd.colors)
elif pcd.has_normals():
colors = (0.5, 0.5, 0.5) + np.asarray(pcd.normals) * 0.5使用Plotly可视化3D点云数据:
fig = go.Figure(
data=[
go.Scatter3d(
x=points[:,0], y=points[:,1], z=points[:,2],
mode='markers',
marker=dict(size=1, color=colors)
)
],
layout=dict(
scene=dict(
xaxis=dict(visible=False),
yaxis=dict(visible=False),
zaxis=dict(visible=False)
)
)
)
fig.show()成功!
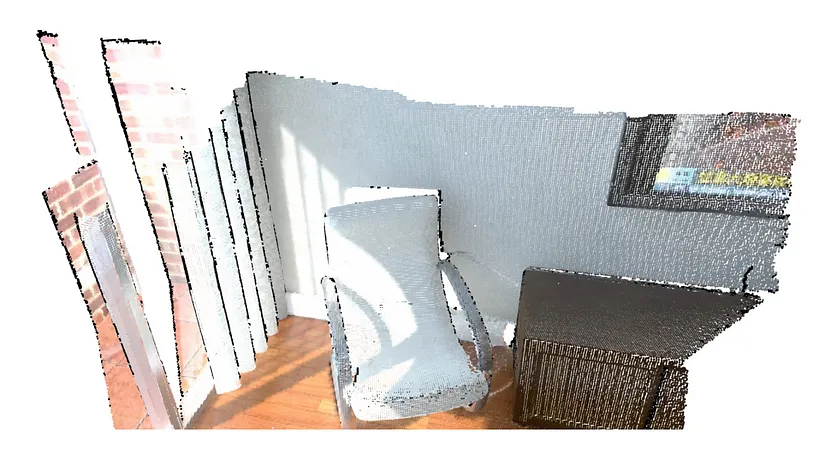
原文链接:Visualize point cloud using Open3D in Colab
BimAnt翻译整理,转载请标明出处





