NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割
构建一致的环境地图并在导航过程中使用它们的能力对于机器人、自动驾驶汽车和其他自主系统来说至关重要。 机器人和汽车需要地图来定位自身、规划高效且无碰撞的轨迹,以及执行许多其他任务。 因此,地图是任何地图或导航堆栈中的中心构建块。
然而,环境地图可能很大,尤其是在表示场景的 3D 几何形状时。 如今,大多数机器人和自动驾驶汽车都使用 3D LiDAR 扫描仪和摄像头来感知周围的世界,并使用这些数据构建地图。 现代车辆每秒生成千兆字节的数据,存储所有这些信息是一个挑战。
高效快速的压缩是现实世界中操作的关键
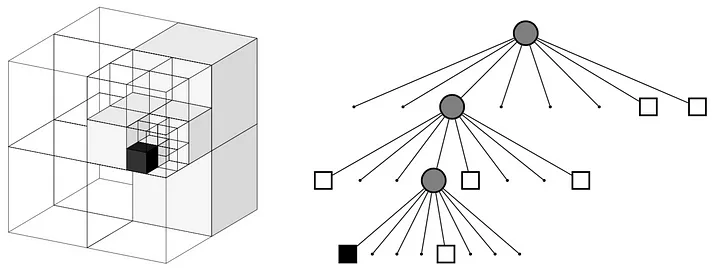
因此,传感器数据和地图信息需要被压缩以便存储和处理。 寻找一种允许紧凑存储和快速查询的有效表示是机器人学、计算机图形学和其他学科中的一个老话题。 一种流行的方式是通过八叉树,它提供分层和递归 3D 存储。 使用这些树的 OctoMap 等技术已经存在多年,并形成了当今的黄金标准。
机器学习提供了新的压缩方法
Louis Wiesmann 等人最近的作品。 提出了一种使用深度神经网络压缩密集 3D 点云图的新方法。 Wiesmann 的这种方法允许计算从大型环境中的自动驾驶车辆获得的 3D 点云数据的紧凑场景表示。
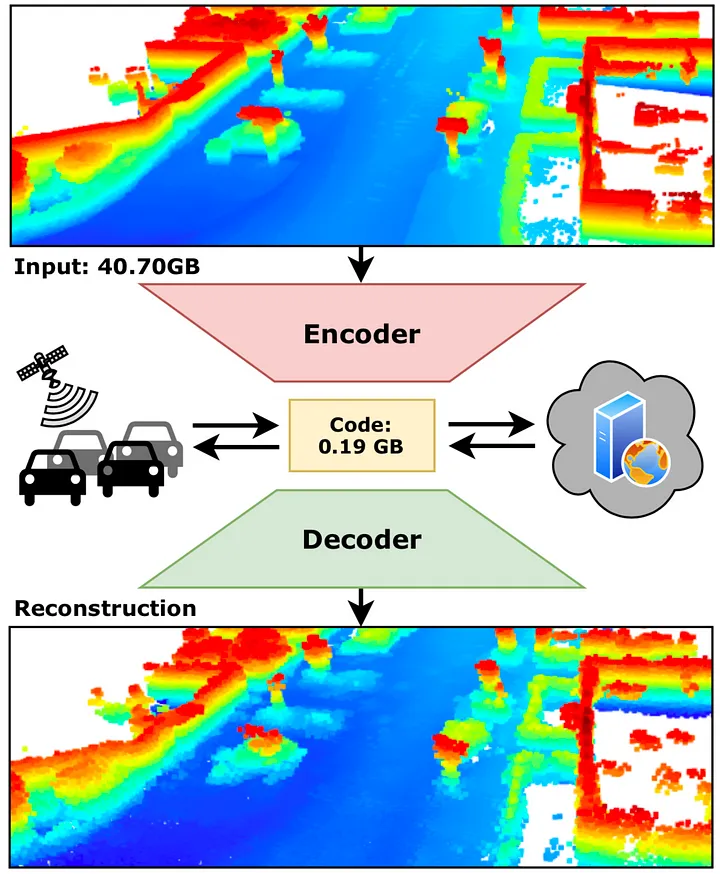
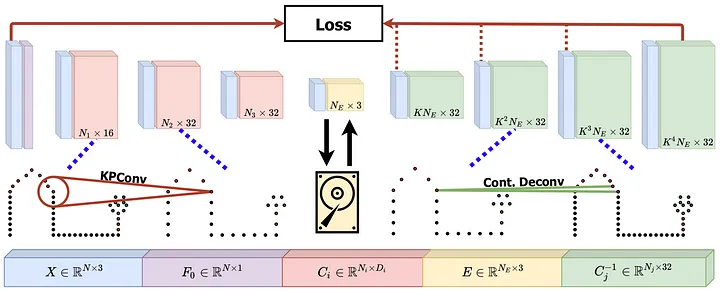
它通过学习一组局部特征描述符来解决压缩问题,从中可以高效且有效地重建点云。 该论文提出了一种新颖的深度卷积自动编码器架构,该架构直接对点本身进行操作,因此不需要体素化。 这意味着与 OctoMap 或 Occupancy Voxel Grids 相比,不需要计算空间的离散化,这是一个很大的优势 - 无需事先承诺特定的分辨率。 该工作还描述了一种反卷积算子,用于从压缩表示中对点云进行上采样,从而以任意密度分解范围数据。
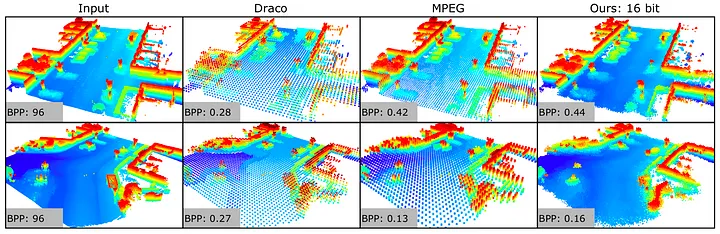
他们的论文表明,与其他最先进的压缩算法相比,学习的压缩在相同的比特率下实现了更好的重建。 它还表明该方法可以很好地推广到不同的激光雷达传感器。
有关更多信息,请参阅:
L. Wiesmann、A. Milioto、X. Chen、C. Stachniss 和 J. Behley,“密集点云地图的深度压缩”,IEEE 机器人与自动化快报 (RA-L),卷。 6,第 2060–2067 页,2021 年。doi:10.1109/LRA.2021.3059633。论文 | 源代码 | 视频
原文链接:Compressing Dense Point Clouds using Deep Learning
BimAnt翻译整理,转载请标明出处