
NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - AI模型在线查看 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割 - 3D道路快速建模
大型语言模型的低秩自适应 (LoRA) 用于解决微调大型语言模型 (LLM) 的挑战。GPT 和 Llama 等模型拥有数十亿个参数,通常对于特定任务或领域进行微调的成本过高。LoRA 保留了预训练的模型权重,并在每个模型块中加入了可训练层。这显著减少了需要微调的参数数量,并大大降低了 GPU 内存需求。LoRA 的主要优势在于,它大幅减少了可训练参数的数量——有时最多可减少 10,000 倍——从而大大降低了 GPU 资源需求。
1、LoRA 为何有效
预训练的 LLM 在适应新任务时具有较低的“固有维度”,这意味着数据可以通过低维空间有效地表示或近似,同时保留其大部分基本信息或结构。我们可以将适应任务的新权重矩阵分解为低维(较小)矩阵,而不会丢失大量重要信息。我们通过低秩近似实现这一点。
矩阵的秩是一个可以让你了解矩阵复杂度的值。矩阵的低秩近似旨在尽可能接近原始矩阵,但秩较低。低秩矩阵降低了计算复杂度,从而提高了矩阵乘法的效率。低秩分解是指通过推导矩阵 A 的低秩近似来有效近似矩阵 A 的过程。奇异值分解 (SVD) 是一种常用的低秩分解方法。
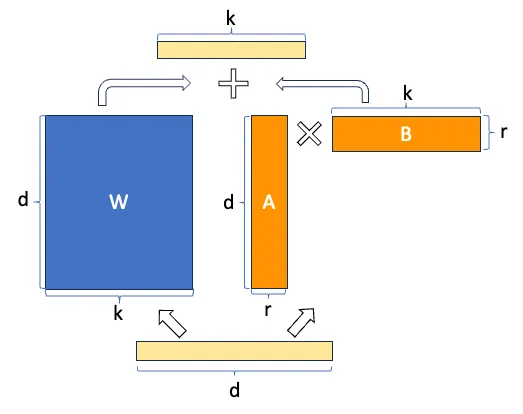
假设 W 表示给定神经网络层中的权重矩阵,假设 ΔW 是经过完全微调后 W 的权重更新。然后,我们可以将权重更新矩阵 ΔW 分解为两个较小的矩阵:ΔW = WA*WB,其中 WA 是 A × r 维矩阵,WB 是 r × B 维矩阵。在这里,我们保持原始权重 W 不变,只训练新矩阵 WA 和 WB。这总结了 LoRA 方法,如下图所示。
LoRA 的优势如下:
- 减少资源消耗。对深度学习模型进行微调通常需要大量计算资源,这可能既昂贵又耗时。LoRA 可在保持高性能的同时减少对资源的需求。
- 更快的迭代。LoRA 可实现快速迭代,从而更轻松地尝试不同的微调任务并快速调整模型。
- 改进迁移学习。LoRA 提高了迁移学习的有效性,因为带有 LoRA 适配器的模型可以用更少的数据进行微调。这在标记数据稀缺的情况下尤其有价值。
- 广泛适用。LoRA 用途广泛,可应用于自然语言处理、计算机视觉和语音识别等不同领域。
- 降低碳排放。通过减少计算要求,LoRA 有助于实现更环保、更可持续的深度学习方法。
2、使用 LoRA 技术训练神经网络
在此博客中,我们利用 CIFAR-10 数据集,使用几个epoch从头开始训练基本图像分类器。之后,我们进一步使用 LoRA 训练模型,说明将 LoRA 纳入训练过程的优势。
2.1 设置
此演示使用以下设置创建。有关全面的支持详细信息,请参阅 ROCm 文档。
硬件和操作系统:
- AMD Instinct GPU
- Ubuntu 22.04.3 LTS
软件:
- ROCm 5.7.0+
- Pytorch 2.0+
2.2 训练初始模型
导入软件包:
import torch
import torchvision
import torchvision.transforms as transforms加载数据集并设置目标设备:
# 10 classes from CIFAR10 dataset
classes = ('airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
# batch size
batch_size = 8
# image preprocessing
preprocessor = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# training dataset
train_set = torchvision.datasets.CIFAR10(root='./dataset', train=True,
download=True, transform=preprocessor)
train_loader = torch.utils.data.DataLoader(train_set, batch_size=batch_size,
shuffle=True, num_workers=8)
# test dataset
test_set = torchvision.datasets.CIFAR10(root='./dataset', train=False,
download=True, transform=preprocessor)
test_loader = torch.utils.data.DataLoader(test_set, batch_size=batch_size,
shuffle=False, num_workers=8)
# Define the device
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")展示数据集的样本:
import matplotlib.pyplot as plt
import numpy as np
# helper function to display image
def image_display(images):
# get the original image
images = images * 0.5 + 0.5
plt.imshow(np.transpose(images.numpy(), (1, 2, 0)))
plt.axis('off')
plt.show()
# get a batch of images
images, labels = next(iter(train_loader))
# display images
image_display(torchvision.utils.make_grid(images))
# show ground truth labels
print('Ground truth labels: ', ' '.join(f'{classes[labels[j]]}' for j in range(images.shape[0])))输出显示:

Ground truth labels: cat ship ship airplane frog frog automobile frog创建一个用于图像分类的基本三层神经网络,注重简单性以说明 LoRA 效果:
import torch.nn as nn
import torch.nn.functional as F
class net(nn.Module):
def __init__(self):
super().__init__()
self.fc1 = nn.Linear(3*32*32, 4096)
self.fc2 = nn.Linear(4096, 2048)
self.fc3 = nn.Linear(2048, 10)
def forward(self, x):
x = torch.flatten(x, 1)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# move the model to device
classifier = net().to(device)接下来训练模型。
我们使用交叉熵损失和 Adam 作为损失函数和优化器。
import torch.optim as optim
def train(train_loader, classifier, start_epoch = 0, epochs=1, device="cuda:0"):
classifier = classifier.to(device)
classifier.train()
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(classifier.parameters(), lr=0.001)
for epoch in range(epochs): # training loop
loss_log = 0.0
for i, data in enumerate(train_loader, 0):
inputs, labels = data[0].to(device), data[1].to(device)
# Resets the parameter gradients
optimizer.zero_grad()
outputs = classifier(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print loss after every 1000 mini-batches
loss_log += loss.item()
if i % 2000 == 1999:
print(f'[{start_epoch + epoch}, {i+1:5d}] loss: {loss_log / 2000:.3f}')
loss_log = 0.0现在开始训练:
import time
start_epoch = 0
epochs = 1
# warm up the gpu with one epoch
train(train_loader, classifier, start_epoch=start_epoch, epochs=epochs, device=device)
# run another epoch to record the time
start_epoch += epochs
epochs = 1
start = time.time()
train(train_loader, classifier, start_epoch=start_epoch, epochs=epochs, device=device)
torch.cuda.synchronize()
end = time.time()
train_time = (end - start)
print(f"One epoch takes {train_time:.3f} seconds")输出如下:
[0, 2000] loss: 1.987
[0, 4000] loss: 1.906
[0, 6000] loss: 1.843
[1, 2000] loss: 1.807
[1, 4000] loss: 1.802
[1, 6000] loss: 1.782
One epoch takes 31.896 seconds一个 epoch 大约需要 31 秒。
保存模型:
model_path = './classifier_cira10.pth'
torch.save(classifier.state_dict(), model_path)稍后我们将使用 LoRA 训练相同的模型,并检查训练一个 epoch 需要多长时间。
加载保存的模型并进行快速测试:
# Prepare the test data.
images, labels = next(iter(test_loader))
# display the test images
image_display(torchvision.utils.make_grid(images))
# show ground truth labels
print('Ground truth labels: ', ' '.join(f'{classes[labels[j]]}' for j in range(images.shape[0])))
# Load the saved model and have a test
model = net()
model.load_state_dict(torch.load(model_path))
model = model.to(device)
images = images.to(device)
outputs = model(images)
_, predicted = torch.max(outputs, 1)
print('Predicted: ', ' '.join(f'{classes[predicted[j]]}'
for j in range(images.shape[0])))输出:

Ground truth labels: cat ship ship airplane frog frog automobile frog
Predicted: deer truck airplane ship deer frog automobile bird我们观察到,仅对模型进行两个阶段的训练并不能产生令人满意的结果。让我们检查一下该模型在整个测试数据集上的表现。
def test(model, test_loader, device):
model=model.to(device)
model.eval()
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data[0].to(device), data[1].to(device)
# images = images.to(device)
# labels = labels.to(device)
# inference
outputs = model(images)
# get the best prediction
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print(f'Accuracy of the given model on the {total} test images is {100 * correct // total} %')
test(model, test_loader, device)输出:
Accuracy of the given model on the 10000 test images is 32 %这一结果表明,通过进一步训练,模型有很大的改进潜力。在以下部分中,我们将把 LoRA 应用于模型,并继续使用这种方法进行训练。
2.3 将 LoRA 应用于模型
定义用于将 LoRA 应用于模型的辅助函数:
class ParametrizationWithLoRA(nn.Module):
def __init__(self, features_in, features_out, rank=1, alpha=1, device='cpu'):
super().__init__()
# Create A B and scale used in ∆W = BA x α/r
self.lora_weights_A = nn.Parameter(torch.zeros((rank,features_out)).to(device))
nn.init.normal_(self.lora_weights_A, mean=0, std=1)
self.lora_weights_B = nn.Parameter(torch.zeros((features_in, rank)).to(device))
self.scale = alpha / rank
self.enabled = True
def forward(self, original_weights):
if self.enabled:
return original_weights + torch.matmul(self.lora_weights_B, self.lora_weights_A).view(original_weights.shape) * self.scale
else:
return original_weights
def apply_parameterization_lora(layer, device, rank=1, alpha=1):
"""
Apply loRA to a given layer
"""
features_in, features_out = layer.weight.shape
return ParametrizationWithLoRA(
features_in, features_out, rank=rank, alpha=alpha, device=device
)
def enable_lora(model, enabled=True):
"""
enabled = True: incorporate the the lora parameters to the model
enabled = False: the lora parameters have no impact on the model
"""
for layer in [model.fc1, model.fc2, model.fc3]:
layer.parametrizations["weight"][0].enabled = enabled将 LoRA 应用于我们的模型:
import torch.nn.utils.parametrize as parametrize
parametrize.register_parametrization(model.fc1, "weight", apply_parameterization_lora(model.fc1, device))
parametrize.register_parametrization(model.fc2, "weight", apply_parameterization_lora(model.fc2, device))
parametrize.register_parametrization(model.fc3, "weight", apply_parameterization_lora(model.fc3, device))现在,我们的模型参数由两部分组成:原始参数和 LoRA 引入的参数。由于我们尚未训练此更新后的模型,因此 LoRA 权重的初始化方式不会影响模型的准确性(请参阅“ParametrizationWithLoRA”)。因此,禁用或启用 LoRA 应该会导致模型的准确性相同。让我们来测试一下这个假设。
enable_lora(model, enabled=False)
test(model, test_loader, device)输出:
Accuracy of the network on the 10000 test images: 32 %enable_lora(model, enabled=True)
test(model, test_loader, device)输出:
Accuracy of the network on the 10000 test images: 32 %这正是我们所期望的。
现在让我们看看 LoRA 添加了多少参数。
total_lora_params = 0
total_original_params = 0
for index, layer in enumerate([model.fc1, model.fc2, model.fc3]):
total_lora_params += layer.parametrizations["weight"][0].lora_weights_A.nelement() + layer.parametrizations["weight"][0].lora_weights_B.nelement()
total_original_params += layer.weight.nelement() + layer.bias.nelement()
print(f'Number of parameters in the model with LoRA: {total_lora_params + total_original_params:,}')
print(f'Parameters added by LoRA: {total_lora_params:,}')
params_increment = (total_lora_params / total_original_params) * 100
print(f'Parameters increment: {params_increment:.3f}%')输出:
Number of parameters in the model with LoRA: 21,013,524
Parameters added by LoRA: 15,370
Parameters increment: 0.073%LoRA 只为我们的模型添加了 0.073% 的参数。
接下来继续使用 LoRA 训练模型。
在继续训练模型之前,我们希望冻结模型的所有原始参数,如论文所述。通过这样做,我们只更新 LoRA 引入的权重,这是原始模型参数数量的 0.073%。
for name, param in model.named_parameters():
if 'lora' not in name:
param.requires_grad = False继续应用 LoRA 训练模型。
# make sure the loRA is enabled
enable_lora(model, enabled=True)
start_epoch += epochs
epochs = 1
# warm up the GPU with the new model (loRA enabled) one epoch for testing the training time
train(train_loader, model, start_epoch=start_epoch, epochs=epochs, device=device)
start = time.time()
# run another epoch to record the time
start_epoch += epochs
epochs = 1
import time
start = time.time()
train(train_loader, model, start_epoch=start_epoch, epochs=epochs, device=device)
torch.cuda.synchronize()
end = time.time()
train_time = (end - start)
print(f"One epoch takes {train_time} seconds")输出:
[2, 2000] loss: 1.643
[2, 4000] loss: 1.606
[2, 6000] loss: 1.601
[3, 2000] loss: 1.568
[3, 4000] loss: 1.560
[3, 6000] loss: 1.585
One epoch takes 16.622623205184937 seconds你可能会注意到,现在只需大约 16 秒即可完成一个 epoch 的训练,这大约是训练原始模型所需时间(31 秒)的 53%。
损失的减少表明模型已经从更新 LoRA 引入的参数中学习到了知识。现在,如果我们在启用 LoRA 的情况下测试模型,准确率应该高于我们之前使用原始模型实现的准确率(32%)。如果我们禁用 LoRA,该模型应该能够达到与原始模型相同的准确率。让我们继续进行这些测试。
enable_lora(model, enabled=True)
test(model, test_loader, device)
enable_lora(model, enabled=False)
test(model, test_loader, device)输出:
Accuracy of the given model on the 10000 test images is 42 %
Accuracy of the given model on the 10000 test images is 32 %使用之前的图像再次测试更新后的模型。
# display the test images
image_display(torchvision.utils.make_grid(images.cpu()))
# show ground truth labels
print('Ground truth labels: ', ' '.join(f'{classes[labels[j]]}' for j in range(images.shape[0])))
# Load the saved model and have a test
enable_lora(model, enabled=True)
images = images.to(device)
outputs = model(images)
_, predicted = torch.max(outputs, 1)
print('Predicted: ', ' '.join(f'{classes[predicted[j]]}'
for j in range(images.shape[0])))输出:

Ground truth labels: cat ship ship airplane frog frog automobile frog
Predicted: cat ship ship ship frog frog automobile frog我们可以观察到,与步骤 6 中获得的结果相比,新模型的表现更好,表明参数确实学到了有意义的信息。
3、结束语
在这篇博文中,我们探索了 LoRA 算法,深入研究了它的原理以及在带有 ROCm 的 AMD GPU 上的实现。我们从头开始开发了一个基本网络和 LoRA 模块,以展示 LoRA 如何有效地减少可训练参数和训练时间。
原文链接:Using LoRA for efficient fine-tuning: Fundamental principles
BimAnt翻译整理,转载请标明出处





