BimAnt
博客首页
在线应用
文档手册
工具链
数据集
施工动画
关于
admin
计算几何
3D碰撞检测的包围体
本文介绍用于在 3D 环境中实现碰撞检测的不同的包围体技术。
计算几何
3D模型的量化
通常,位置和法线等3D模型属性存储为 32 位浮点数。 量化将它们存储为 16 位整数,意味着文件更小、下载速度更快、GPU 内存使用量更少且性能不会下降。
激光点云
Draco压缩大规模点云
Cesium使用Draco压缩大规模点云数据,效果很好。
激光点云
PCL点云压缩简明教程
点云由描述与距离、颜色、法线等附加信息相关的三维点的巨大数据集组成。PCL库提供点云压缩功能,它允许对各种点云进行编码,包括“无组织”点云。
计算几何
AABB树碰撞检测
AABB树允许我们组织和索引我们的 AABB,以最大限度地减少 AABB 交叉测试的数量。
计算几何
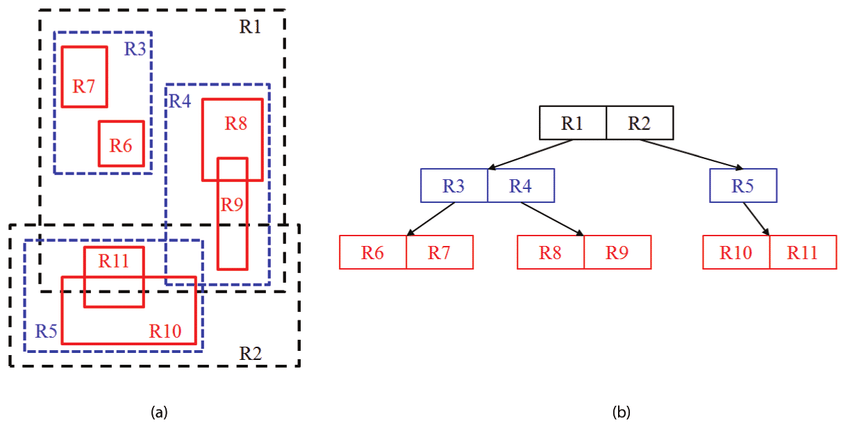
R-Tree原理及朴素实现
R树是用于空间访问方法的树数据结构,本文介绍其构造原理并给出Python实现代码。
计算几何
R-Tree空间索引算法
R-Tree是一种高效的空间索引算法,在这篇博文中,我们将讨论R-Tree如何工作以及如何实现R-Tree算法。
计算几何
用R树加速空间检索
本文介绍如何利用R-Tree了解大幅提升空间搜索的性能。
计算几何
空间搜索算法研究
如何在瞬间搜索数百万个空间点?这需要空间搜索算法的支持。
Load More
博客首页
在线应用
文档手册
工具链
数据集
施工动画
关于