NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - AI模型在线查看 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割 - 3D道路快速建模
随着技术不断进步,空间计算(spatial computing)似乎成为一股变革力量,正在重新定义我们与数字世界互动的方式。 这一前沿学科统一了数字世界和物理世界,使机器能够看到、理解并在 3D 空间中移动。 空间计算从根本上来说是复杂算法和强大框架的集合,它们协同工作,使机器人、计算机视觉、增强现实 (AR)、虚拟现实 (VR) 和人工智能 (AI) 顺利集成到我们的日常生活中。 本文探讨了空间计算的基本要素,并分析了这些技术影响未来社会的方式。
1、技术背后的愿景:计算机视觉算法
计算机视觉是让机器感知和理解视觉世界的领域,对于空间计算至关重要。 为了让设备能够感知深度和运动,SURF(加速鲁棒特征)和 SIFT(尺度不变特征变换)等算法对于定位和跟踪兴趣点至关重要。 同步定位与地图绘制 (SLAM) 是在未知领域实现实时地图绘制和定位的一项关键技术。 此功能对于自主机器人和增强现实应用至关重要,因为它为智能设备与其环境的交互奠定了基础。

左上角显示了位置的训练图像,右上角显示了从不同视点拍摄的 640x315 像素测试图像。 识别的区域显示在下图上,关键点显示为正方形,外部平行四边形显示用于识别的仿射变换下的训练图像的边界
Lowe, D.G. (2004)。 “来自尺度不变关键点的独特图像特征。” International Journal of Computer Vision, 60(2), 91-110 介绍了 SIFT(尺度不变特征变换)算法,这是一种从图像中提取独特的不变特征的方法,可用于在不同视图之间进行可靠的匹配。 一个物体或场景。
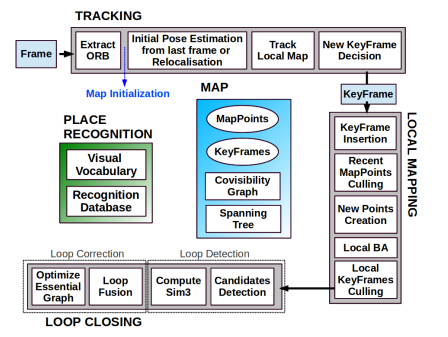
上图为ORB-SLAM 系统概述,显示跟踪、本地映射和循环闭合线程执行的所有步骤。 还显示了地点识别模块和地图的主要组件。
Mur-Artal, R.、Montier, J. M. M. 和 Tardós, J. D. (2015)。 “ORB-SLAM:多功能且精确的单目 SLAM 系统。” IEEE Transactions on Robotics, 31(5), 1147-1163 ORB-SLAM 是一种用于单目、立体和 RGB-D 相机的高效 SLAM 系统,包括地图重用、循环闭合和重新定位功能。
2、增强现实:ARKit 和 ARCore 框架
AR体验的出现在很大程度上要归功于苹果的ARKit和谷歌的ARCore等框架。 这些技术使开发人员能够设计身临其境且将数字与现实世界无缝集成的 AR 应用程序。 ARKit 和 ARCore 通过增强环境增强用户参与度,并通过利用运动跟踪、环境感知和光估计来支持从交互式游戏到教学辅助的各种应用程序。

3、沉浸式世界:Unity 3D 和虚幻引擎
在空间计算领域,Unity 3D 和虚幻引擎至关重要,尽管它们最初是为游戏制作而创建的。 凭借其出色的渲染功能以及对 AR 和 VR 开发的广泛支持,可以轻松制作逼真的 3D 环境。 开发人员可以通过生成逼真的模拟和虚拟体验来扩展虚拟培训、建筑可视化和其他领域的可能性。
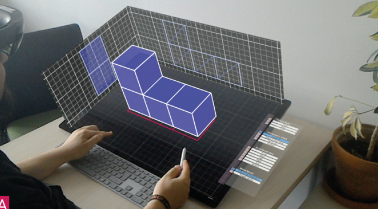
“DesignAR:将增强现实与交互式显示相结合的沉浸式 3D 建模”研究文章介绍了 DesignAR,这是一个用于创建 3D 模型的增强设计工作站。 这种创新方法将显示 2D 视图的交互式表面与头戴式立体增强现实 (AR) 无缝集成,创建组合输出空间。 该空间扩展了屏幕空间,并能够将 3D 对象放置在显示边界之外,从而有效地合并 2D 和 3D 视图,以提供全面的设计体验。
4、太空智能:人工智能和机器学习
空间计算背后的大脑是机器学习和人工智能,它允许设备从周围环境中获取线索并进行调整。 卷积神经网络 (CNN) 在图像识别中发挥着关键作用,使系统能够对视觉信息进行分类和理解。 与此同时,借助强化学习算法,自主机器人可以更自然、更有效地导航和操纵空间,这使它们能够根据与 3D 世界的交互做出判断。
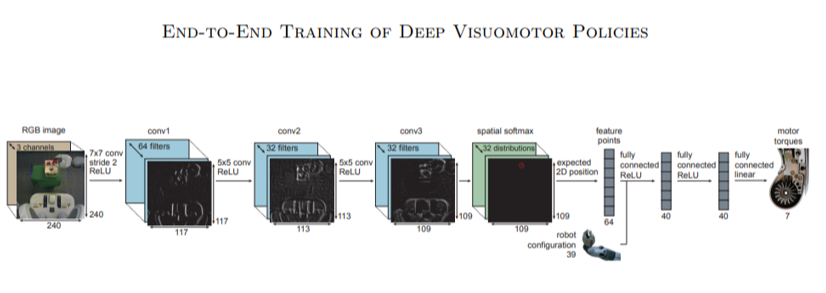
上图为视觉运动政策架构。 该网络包含三个卷积层,后面是一个空间 softmax 和一个将像素级特征转换为特征点的预期位置层,这更适合空间计算。 这些点与机器人配置连接,然后通过三个完全连接的层以产生扭矩。
Levine, S.、Finn, C.、Darrell, T. 和 Abbeel, P. (2016)。 “深度视觉运动策略的端到端训练。” 机器学习研究杂志,17(39), 1-40。 这项研究展示了如何将深度学习应用于机器人控制任务,使机器人能够从视觉输入中以端到端的方式学习运动任务。 这是了解如何将强化学习和 CNN 结合起来进行机器人导航和操作的重要参考。
5、运动力学:机器人和运动控制
空间计算可以在机器人领域实现与现实世界的复杂交互。 借助逆向运动学 (IK) 算法,可以精确地移动和操纵机械臂,该算法确定到达特定位置所需的关节角度。 A* 和 RRT 等路径规划算法可确保复杂环境中的有效导航,这对于无人机和自动驾驶汽车的进步至关重要。

上图中,重新定位手部姿势可以通过许多不同的策略来完成。 更简单的策略包括将操作员的关节角度直接映射到机器人,或使用操作员的指尖作为逆运动学目标。
空间计算和直观交互:将混合现实和机器人技术结合在一起是前沿研究的一个例子,探索混合现实 (MR) 和机器人技术在空间计算领域的融合。
6、结束语
这些算法和框架的融合代表了空间计算的重大进步,为融合现实和虚拟世界的创新应用程序铺平了道路。 随着这些技术的进步,它们有可能通过引入新的参与和互动维度来彻底改变我们与数字内容互动的方式。 空间计算是开启未来的关键,数字和物理领域融合成单一的交互式体验,从沉浸式教育和培训到增强的购物体验等等。
原文链接:Navigating the New Horizons: The Core of Spatial Computing
BimAnt翻译整理,转载请标明出处