NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - AI模型在线查看 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割 - 3D道路快速建模
本文介绍如何使用参数化 CAD 软件中几何约束的强大功能来加速机构的开发。
许多 CAD 程序提供了用于分析和改进机制的工具。但是,这些假设你已经有了初始设计。合成机构的经典图形方法提供了确定连杆长度和关节位置以产生特定运动的方法。
这些方法可以使用参数化 CAD 软件中的几何约束的强大功能进行加速。采用这种方法,通常还可以使用第一原理方法合成一种机制来满足特定的设计意图,而无需了解传统的图形方法。
无论是采用传统的图形方法还是采用第一原理方法,CAD 软件中的机构合成都使用内置的几何约束求解器。这是任何参数化 CAD 程序(如 SolidWorks、CATIA 或 Inventor)中草图绘制功能的核心工具。当你绘制一条线,将其设置为垂直、等长等,然后观察它卡入到位时,是几何约束求解器在后台执行计算以确定其位置。
从根本上说,这涉及求解一组联立方程。因此,创造性地使用草图工具可以提供一种高度直观的方式,利用强大的数学求解器来确定机构通过某些指定位置或方向所需的精确连杆长度关节位置。
用于合成任何机制的通用方法,使用几何约束求解器,无论是应用于传统图形方法还是第一原理方法,都是相同的。它涉及以下步骤:
- 在描述所需运动的多个位置或方向上绘制链接
- 在这些位置中的每一个位置绘制一个近似机构,未知关节位置和链接长度不受约束。
- 将接地关节设置为每个位置重合。
- 将每个位置的链接长度设置为相等。
- 允许几何约束求解器确定满足这些约束的连接长度和接地关节位置。
- 约束模型中任何剩余的不受约束的自由度以创建最佳机制。
1、机构设计基础理论
大多数机构设计都涉及刚体运动学,其中假设每个连杆都是不能弯曲的刚体。
在三维空间中,刚体有 6 个自由度 (DOF):x、y 和 z 方向的平移,以及围绕每个轴的旋转。然而,大多数时候机构是在 2D 中设计的,即使是显而易见的 3D 机制也往往只是这些平面 2D 机制的组合。在这种情况下,每个连杆的运动都被限制在一个平面上并且有 3 个自由度:x 和 y 方向的平移,以及在运动平面上的旋转。
如果由四个刚体组成的 4 杆平面连杆没有将连杆连接在一起的关节,那么它将有 12 个自由度,但这不是一个机构,它只是一个零件的集合。 当连杆通过关节连接在一起时,就形成了一种机制。
二维平面机构可能有三种运动学关节,它们是销关节(Pin Joint)、像活塞一样工作的全滑动关节(Full Sliding Joint)或像槽中的销一样的半滑块(Half Slider)。销接头移除两个DOF(两个平移),全滑块也移除两个DOF(平移和旋转),半滑块移除 1个DOF(平移)。因为合成机构不关心整个机构在空间中的运动,所以一个链接被认为是接地的,并作为运动发生的参考系,因此它没有自由度。 Gruebler 方程给出了机构的自由度:

其中:
- L 是链接数(包括地面)
- JP为销接头数,
- JFS是全滑动关节数
- JHS 是半滑动关节的数量。
大多数机构都需要一个自由度,将运动限制在一个维度上,沿着已知路径前后移动。如果结构的自由度恰好为零,则它被称为桁架(Truss),而具有负自由度的结构可以看作是静不定或预加载的。Gruebler方程可以为复杂的机制提供有用的检查,它并不完全可靠,因为格鲁布勒悖论可能导致某些机制具有比方程建议的更多的自由度。
2、机制合成的种类
机制合成通常根据其目的分为:
- 路径生成:通过指定路径移动单个点
- 运动生成:使一条线通过多个规定的位置
- 函数生成:尝试将输入函数映射到输出函数。对于任何不是简单路径或运动生成的问题,这都是一个包罗万象的东西
3、传动角和切换
传动角是一种量化机制移动自由度以及它是否会锁定或“切换”到特定位置的方法。
传动角给出了两个连杆之间的角度,其中一个连杆通过连接它们的关节向另一个连杆施加力。如果第一个连杆施加的力作用在第二个连杆上的连接点行进的方向上,则所有力都将用于移动第二个连杆。如果力的作用方向垂直于可能的运动方向,则不会产生产生运动的分力,机构将锁定。
虽然这提供了第一性原理解释,但传动角并不是这样定义的。
在4 连杆机构中,四个连杆通常根据施加力的位置进行标记:
- 地面连杆:Ground Link,固定关节固定的固定参考点
- 驱动器:Driver,施加力的连杆,使其绕地面连杆旋转。也称为输入连杆,或者对于某些类型的连杆,即曲柄
- 输出连杆:Output Link,由于通过其他连杆传递的力,绕地面上的固定点旋转的另一连杆。
- 耦合器:Coupler,连接驱动器移动端和输出连杆的连杆机构。

在这个 4 杆联动装置的示例中,四个连杆通常根据施加力的位置进行标记。接地连接是指固定固定关节的固定点。驱动器指的是经历并施加力以使其围绕地面连杆旋转的连杆。它也被称为输入连杆,或者对于某些类型的连杆,称为曲柄。输出连杆是由于通过其他连杆传递的力而绕地面上的固定点旋转的连杆。耦合器是连接驱动器和输出连杆的移动端的连杆机构。
在这种情况下,传输角定义为耦合器和输出链路之间的锐角。 90 度的传动角意味着耦合器传递的所有力都作为力矩施加,以使输出连杆围绕地面连杆旋转。当传递角为零时,所有的力都直接通过输出连杆另一端的接地接头传递,没有产生使输出连杆运动的力矩,机构不运动。这称为切换位置。
如果需要自由移动,应避免小传动角。特定机制的最小值将取决于施加的力、摩擦力和加速度。一般应避免低于 30 度的传输角。 自由运动并不总是机构设计的目标。通常,机制被故意设计为在特定位置锁定或切换。例如,一个锁定在其打开位置的架子,例如卡车的后挡板。当搁板降低时,它会到达一个肘节位置,这样就不能再次抬起它,如下图所示。当力施加到后挡板时,在其打开位置,力通过耦合器传递到具有零传输角的输出连杆,因为耦合器和输出连杆彼此对齐。如果对对齐的连杆之一施加力,后挡板将关闭。如果力作用于上连杆,如下图所示,耦合器以 45 度的传递角作用,使尾门关闭。
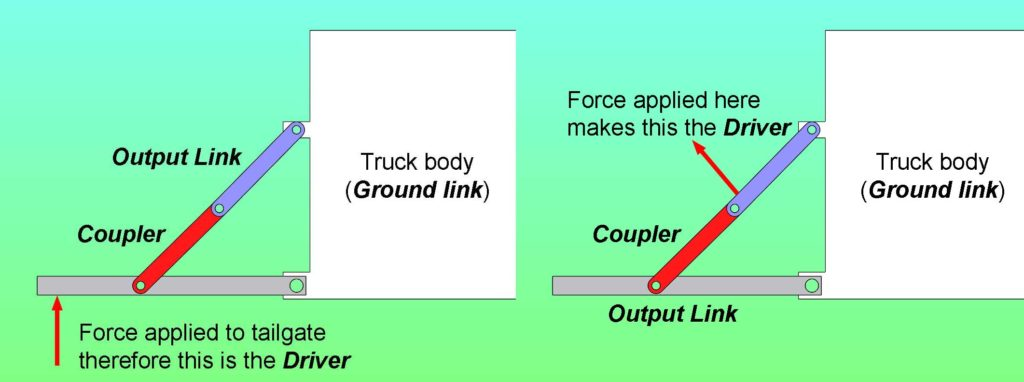
自由运动并不总是机构设计的目标。一个示例是锁定在其打开位置的搁板。当搁板被降低时,它会到达一个肘节位置,因此它不能再次被抬起。当施加力时,在货架的打开位置,由于耦合器和输出连杆相互对齐,力通过耦合器以零传递角传递到输出连杆。
在 CAD 软件中使用基于几何约束的草图绘制时,可以添加约束以限制或定义指定位置的传动角。
4、基于CAD的机构设计
下面通过一个简单的例子可以最好地理解使用基于几何约束的草图实现机构设计的过程。考虑设计一个紧凑的机构来产生一个长100 mm、半径大约 10 m 的运动路径。这可以使用4 连杆来实现。
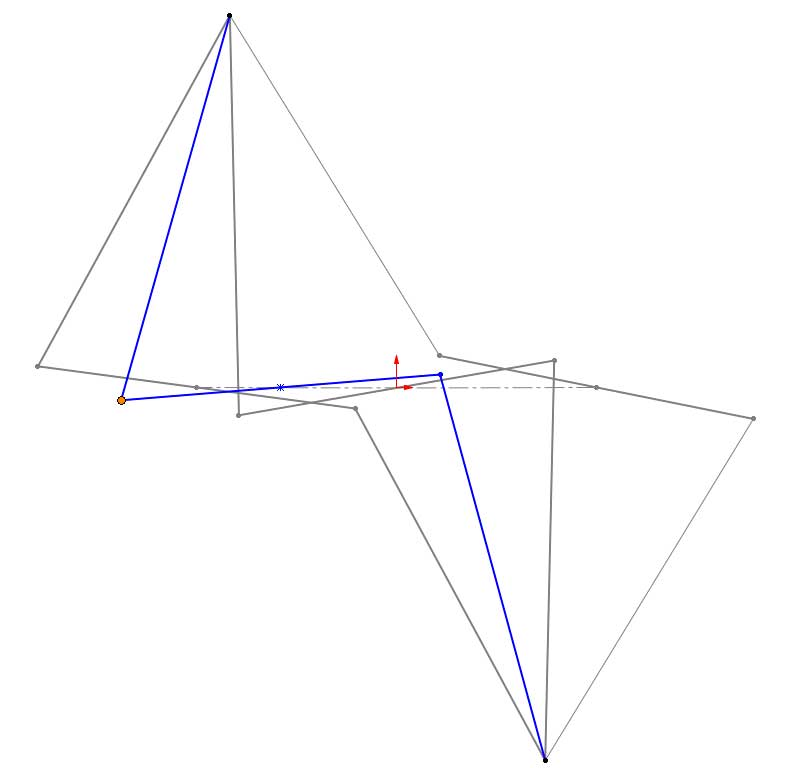
第一步是在三个近似位置画出4 连杆机构的草图,每个位置都约束到运动路径上的一个点,可以方便地位于另一个参考草图中。 “浮动连杆”上实际遵循运动路径的点称为“耦合点”。为简单起见,浮动连杆的中点已用作此示例中的耦合点。对于更复杂的运动,通过创建三角形而不是单线来表示浮动连杆,耦合器点可以很容易地偏离浮动连杆的轴。如果你这样做,只需确保使用使三角形的每一边在每个位置的长度相同。然后对三个移动连杆中的每一个进行约束,使其在每个位置的长度相等。
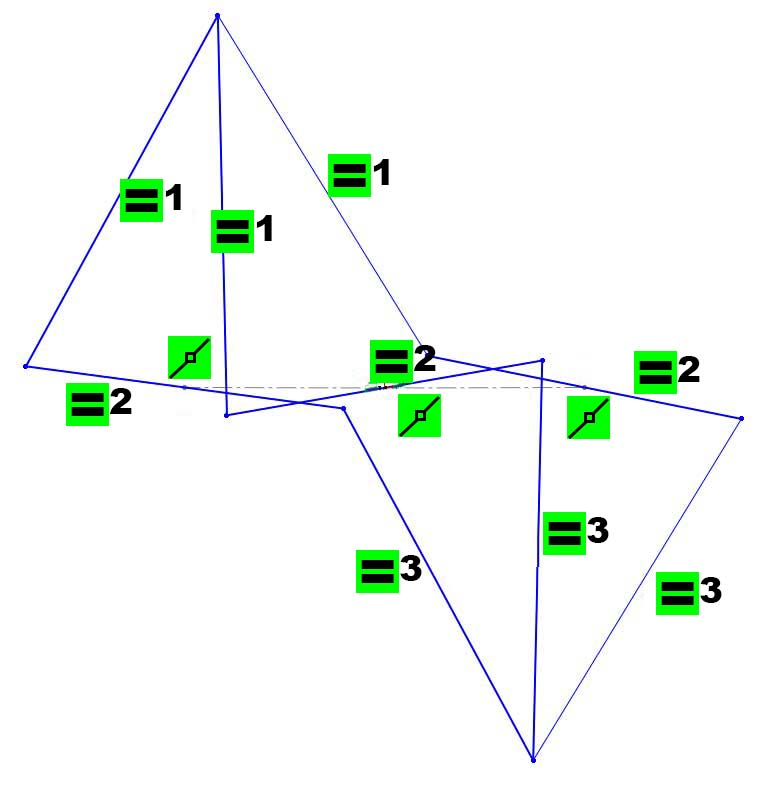
上面是一个使用基于几何约束的草图合成机制的示例。这种紧凑的机构可以使用 4 杆连杆产生100 毫米长、半径约为 10 米的运动路径。第一步是在三个近似位置画出 4 连杆机构的草图,每个位置都约束到运动路径上的一个点,可以方便地位于另一个参考草图中。为简单起见,浮动链路的中点已用作此示例中的耦合器点。然后对三个移动连杆中的每一个进行约束,使其在每个位置的长度相等。
通过简单地添加相等约束,CAD 软件自动生成了一个机制,该机制将通过定义的位置。在这个阶段,草图没有被完全约束。可以使用不同的链接长度或关节位置来满足约束。因此,添加额外的维度以符合设计意图的方式约束机制是有意义的。由于目标是紧凑的机构,因此连杆长度很重要。它还旨在产生运动,因此应避免小的传输角度。完全定义的机构综合草图如下所示。
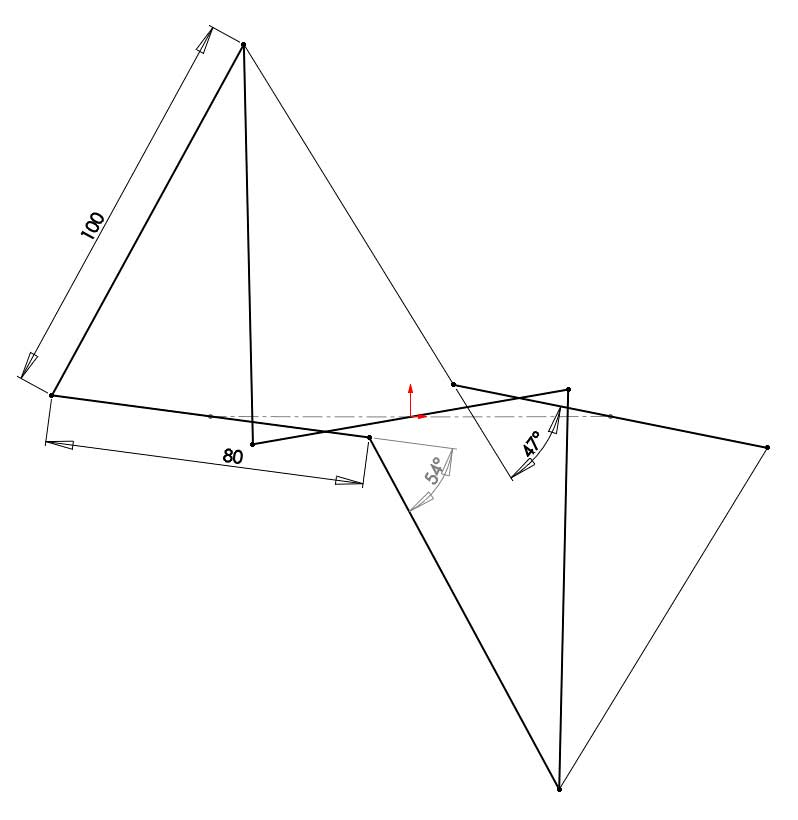
通过简单地添加相等的约束,CAD 软件自动生成了一个将通过定义位置的机构。在这个阶段,草图没有被完全约束。可以使用不同的链接长度或关节位置来满足约束。因此,添加额外的维度以符合设计意图的方式约束机制是有意义的。
验证该机制很重要。在单独的草图中,再次绘制机构草图,使用相同的地面关节位置和连杆长度,但不将其约束到运动路径上的任何点。然后可以将其拖过运动范围以验证其是否按预期运行。
要验证机构,请再次绘制机构草图,使用相同的地面关节位置和连杆长度,但不要将其约束到运动路径上的任何点。然后可以将其拖过运动范围以验证其是否按预期运行。
这只是一个简单的例子,但经过一些思考,该方法可以应用于解决涉及平面和三维机构的复杂机构合成的问题。
原文链接:Mechanism design using geometric constraints
BimAnt翻译整理,转载请标明出处