
NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割
LiDAR(激光雷达)和RADAR(雷达)都是用于检测、跟踪和各种物体成像的遥感设备,在很多领域都有助于测量,包括环境研究、太空探索和医学发现。
虽然它们在广泛的行业内使用,但激光雷达和雷达正在激发其在自动驾驶车辆领域的功能。对于LiDAR和RADAR哪个更好的讨论已经困扰了整个行业一段时间。
大多数制造商选择激光雷达传感器作为他们的顶级传感设备。另一方面,特斯拉的首席执行官、行业核心人物伊隆·马斯克曾多次表示他更喜欢雷达。
自动驾驶车辆需要了解周围的环境。通常,在自动驾驶车辆中实现物体检测的系统包括通过传感器融合算法连接的各种传感设备,包括激光雷达、雷达、超声波传感器和摄像机。
虽然LiDAR和RADAR的目标重叠,但所使用的波类型的不同使得它们的能力彼此大相径庭。
什么是激光雷达?
激光雷达使用激光实现成像、检测和测距。虽然与雷达相比,这是一个相当新的概念,但它自20世纪60年代发现激光以来就一直存在。
有两种类型的激光雷达传感设备:机载和地面。
地面激光雷达使用波长为 500 - 600 nm 的激光,用于各种应用,如滑坡研究或自动驾驶车辆障碍物检测。另一方面,机载激光雷达使用波长为1000-1600 nm的激光,主要用于收集地形数据。
激光雷达系统是可靠的,因为它们能够测量高精度的环境,并根据结果生成 3D 图像。
激光雷达是如何工作的?
激光雷达中用于检测物体的激光可以是离散的,也可以是连续的。
使用连续波的激光雷达传感器使用返回信号的相位差来确定物体的距离和特征。对于脉冲波,我们更感兴趣的是发送和接收的信号的振幅,以创建一个云点,反映检测到的对象。
在测量中,全波形信号常用于林业,而脉冲信号在其他领域使用较多。
激光雷达系统主要由光源和接收器或传感器组成。光源发射出激光,从目标上反射回到激光雷达系统,最后由传感器捕捉到反射的脉冲。
为了确定物体的精确距离,激光雷达系统根据光速计算激光发射和接收时间之间的时间间隔。
LiDAR 本身可以捕获对象相对于激光雷达系统的位置、大小和形状。但是,激光雷达传感器通常与 GPS、IMU 传感器或摄像头配对,以提高其功能。
什么是雷达?
雷达使用无线电波进行探测和测距。正如它的名字所暗示的,雷达的工作原理几乎与激光雷达相同,只是它使用无线电波而不是激光。
与光波相比,无线电波的波长要长得多,因此雷达能够覆盖更长的距离。使用的无线电波的频率和类型取决于测量设备的要求。
| 雷达波段 | 频率 (GHz) | 波长(厘米) |
| 毫米 | 40-100 | 0.75-0.30 |
| Ka | 26.5-40 | 1.1-0.75 |
| K | 18-26.5 | 1.7-1.1 |
| Ku | 12.5-18 | 2.4-1.7 |
| X | 8-12.5 | 3.75-2.4 |
| C | 4-8 | 7.5-3.75 |
| S | 2-4 | 15-7.5 |
| L | 1-2 | 30-15 |
| UHF | 0.3-1 | 100 |
雷达的发现早于激光雷达,雷达的首次已知应用可追溯到20世纪初。 雷达系统主要用于跟踪、探测和二维成像等各个行业,如环境研究、军事防御和智能建筑的发展。
雷达是如何工作的?
与激光雷达类似,雷达系统有两个主要组件:发射机和接收器。这是现代雷达系统的示意图:
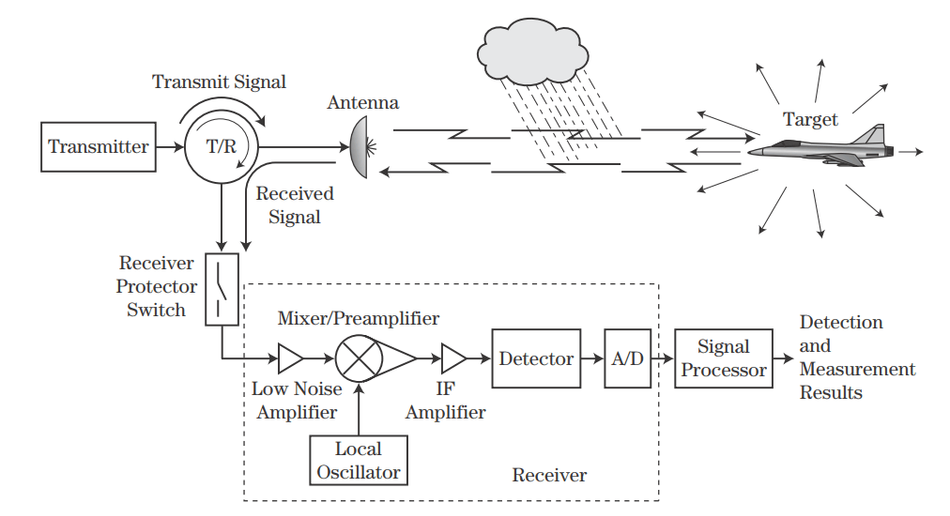
雷达系统使用的无线电波也可以是连续的或脉冲的,这是更频繁的选择。
雷达中的发射器和天线协同工作。发射机产生电磁波,天线通过介质发出波。
然后,信号通过介质传播,并通过目标反射回雷达系统,雷达系统通过接收器接收反射的无线电波。RADAR 使用信号传输与接收反射信号的时间间隔来处理无线电波并确定与系统的距离。
雷达系统使用天线传输无线电信号。
根据雷达的应用,传输信号的频率会有所不同。雷达的频率决定了雷达系统的局限性和功能,例如射程、波长和天线大小。
频率较高的系统具有更低的功率、更高的衰减和更精细的检测功能,这使得它们非常适合需要更高分辨率的短程应用,例如自动驾驶车辆。
激光雷达 vs 雷达:哪种技术更好?
虽然激光雷达和雷达的目标和原理相同,但两个系统使用的波类型导致了两者的差异。
LiDAR 和 RADAR 在不同的系统中各有其优势和劣势,而不能简单地说哪个更好。
准确性
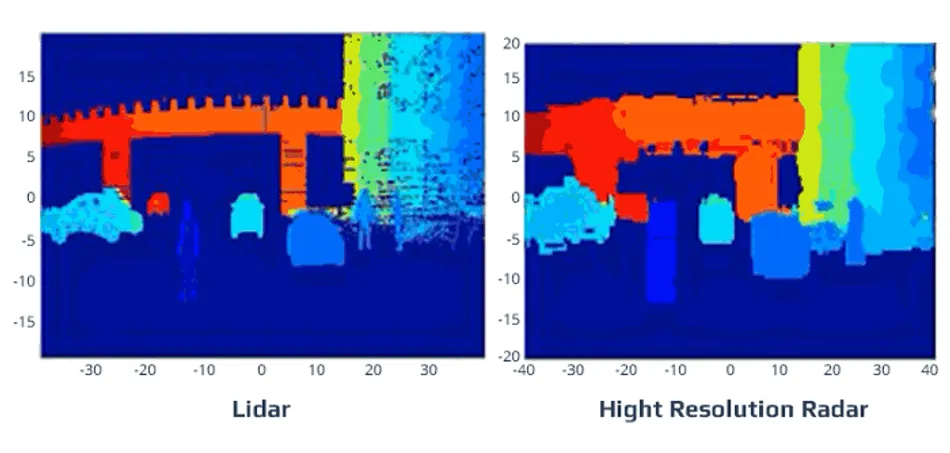
从上图中可以看出,通过激光雷达系统形成的图像比通过雷达形成的图像更清晰、更详细。
激光雷达使用在纳米范围内工作的光信号,使激光雷达系统比雷达系统更准确、更精确。较小的波长还意味着激光雷达系统可以检测较小的物体、给出目标的大小,并创建目标的 3D 图像。
另一方面,雷达图像的分辨率受所用天线尺寸的限制。尺寸较大的天线产生频率较高的波,从而产生分辨率更高的图像。请记住,天线的要求也取决于测量系统的局限性。
简言之,当你需要创建详细的图像时,激光雷达是最佳选择,而雷达在需要持续检测目标距离时表现更好。
可靠性
虽然雷达的精度还有待提高,但它比激光雷达可靠得多。
激光雷达使用光波作为介质,很容易受到介质本身的影响。例如,大气中的湿气会影响激光雷达系统的性能,激光雷达系统在恶劣天气(如雨、雾或暴风雪)中表现不佳。
此外,大多数用于自动驾驶车辆的激光雷达都使用旋转装置来拍摄激光脉冲,这意味着需要定期维护才能保持其正常工作。然而,最近有越来越多的固态激光雷达系统选项,因此这一问题在将来可能不再令人担心。
另一方面,RADAR 使用波长大得多的无线电波,因此它有足够的功率覆盖比激光雷达更长的距离。
无线电波的衰减率也较低,即使在恶劣天气下,无线电波的传播也受到极小的干扰。当依赖光学原理的传感器受到损害时,雷达是替代的绝佳选择,即使分辨率较低。
成本
多年来,LiDAR 传感器由于成本高昂,对大多数制造商来说都不是一种好的选择。
Velodyne 的高端汽车激光雷达过去每辆车的价格是 75,000 美元。
然而,近年来,LiDAR 一直在进行大幅降价,许多公司正在努力使激光雷达系统更实惠。
2020 年初,Velodyne 发布了一款不含可移动部件的固态激光雷达,名为 Velabit。
另一方面,与激光雷达相比,雷达系统一直是更便宜的选择,汽车毫米波雷达传感器模块的价格低至50美元。
激光雷达传感器的价格是自动驾驶汽车价格高的部分原因。大多数自动驾驶技术使用激光雷达来检测环境,如Waymo,丰田和Uber,而特斯拉则继续避免使用激光雷达并为其自动驾驶汽车开发雷达。
结论
Except for the type of wave used, LiDAR and RADAR are almost identical in principle. Both use a transmitter to emit a wave and use the reflected wave received by the sensor to decide the precise distance to the target.
除了使用的波类型不同,LiDAR和RADAR基本上是一样的。这两种技术都使用发射器发送波,然后利用传感器接收的反射波来确定目标的准确距离。
要决定哪一个技术更适合你的项目,需要先确定测量单元的要求和限制。
激光雷达使用的激光波长比雷达使用的无线电波短得多。因此,LiDAR 具有更好的精度,这使得它能够更详细地检测较小的对象,并利用获得的高分辨率图像创建 3D 图像。
另一方面,雷达要比激光雷达更可靠。虽然不能获得那么多细节,但RADAR可以在更恶劣的条件下工作,并且比 LiDAR 的检测范围更大。
或者,你可以使用数据融合算法将雷达和激光雷达与其他传感器相结合,以创建具有更好功能的系统。
所以,关于LiDAR和RADAR请记住以下要点:
- 激光雷达和雷达都是遥感设备,分别使用光波和无线电波来探测物体。它们使用波发送时间与反射波接收时间的间隔进行探测。
- 光波与雷达相比具有更好的精度和准确性。但是,雷达传感器更可靠。激光雷达经常发生故障并且在长距离场景下表现不佳,而雷达在恶劣天气下表现良好。
- 与激光雷达传感器相比,雷达系统更实惠。然而,随着许多公司持续开发低价固态激光雷达,这种情况可能会改变。
原文链接:LiDAR vs RADAR: Detection, Tracking, and Imaging
BimAnt翻译整理,转载请标明出处




